
Greetings, I’m Jesudara Omidokun, but you can call me Dara. Currently in my inaugural year as a Ph.D. student (since 2024) within the Department of Industrial and Manufacturing Systems Engineering at the University of Michigan Dearborn, I am under the mentorship of Professor Bochen Jia. My research primarily centers around the intersection of human ergonomics and 3D vision, encompassing areas such as 3D human reconstruction, animation, and generation. My academic pursuits also extend to the fascinating realm of robotics, specifically focusing on connected vehicles and self-driving technology.
Beyond academia, I possess a profound passion for chess, reflecting my strategic and analytical mindset. As a dedicated and enthusiastic individual, I am eager to contribute my skills and knowledge to innovative projects, and I am actively seeking opportunities for collaboration and sponsorship to further propel my academic and research endeavors.
Background
 | Ph.D. Student. Sep. 2024 - Jun. 2028 (Expected) Department of IMSE University of Michigan-Dearborn |
| | Master of Science in Engineering. Sep. 2020 - Jun. 2022 College of Electrical and Compter Science Department of Electrical and Computer Engineering University of Michigan-Dearborn |
 | Bachelor of Science in Engineering. Sep. 2015 - Jun. 2019 Department of Engineering University of Maryland Eastern Shore |
Research
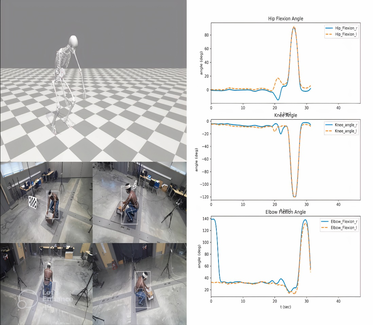 | Leveraging Digital Perceptual Technologies for Remote Perception and Analysis of Human Biomechanical Processes: A Contactless Approach for Workload and Joint Force Assessment J. Omidokun, D. Egeonu, B. Jia, L. Yang 2024 This study presents an innovative computer vision framework designed to analyze human movements in industrial settings, aiming to enhance biomechanical analysis by integrating seamlessly with existing software. Through a combination of advanced imaging and modeling techniques, the framework allows for comprehensive scrutiny of human motion, providing valuable insights into kinematic patterns and kinetic data....... Webpage| Paper | Video | Code | Bibtex |
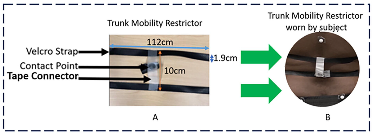 | Biomechanical Assessment of Exoskeleton Intervention for Injured and Recovering Workers: A Simulation Study of Bending Tasks , D. Egeonu, J. Omidokun, B. Jia, L. Yang 2024 Exoskeletons, wearable devices designed to enhance physical activity, show promise in mitigating work-related musculoskeletal disorders and injuries. This study examines exoskeleton efficacy as ergonomic intervention for aiding injured workers with limited trunk mobility in returning to work. Six adult males participated in simulated bending tasks using a trunk mobility restrictor and a passive trunk exoskeleton.... Webpage| Paper | Video | |
 | Design and Implementation of an Autonomous Driving System with a Deep Learning Approach on a Scaled Vehicle Platform J. Omidokun 2025 The thesis project is developed to create a platform for autonomous driving research and education purposes. The main goal of this study is to present a complete and adequate way for building a platform with a drive-by-wire system and sensor packages that are both comprehensive and appropriate for testing and deploying machine-learning-based algorithms on a scaled vehicle.... Webpage| Paper | Video | Code | |
Field-Applicable Ground Reaction Force Estimation Through Deep Learning: Enhancing Biomechanical and Ergonomic Assessments , D. Egeonu, J. Omidokun, B. Jia 2024 This study proposes a machine learning-based model to estimate ground reaction forces using joint coordinate data captured via motion tracking systems. Twelve healthy subjects performed bending and squatting tasks, with kinematic and kinetic data collected from a motion capture system and force plates. These data were then used to train and validate a deep-learning neural network model for ground reaction force estimation in practical, field applications. Model performance will be assessed using root mean square error. This approach aims to deliver a handy tool for ground reaction force estimation, potentially integrable with computer vision techniques to facilitate on-the-field biomechanical assessments for ergonomic and related applications Video | |
Experience
Projects
Others
Skills
- C++ (OpenCV, OpenGL, CUDA, Eigen, PCL, Qt, …)
- Python (Tensorflow/PyTorch)
- Matlab, C
- LaTex
Languages
- English (TOEFL: 104; GRE: 150+168+4.5)
- French
- IELTS